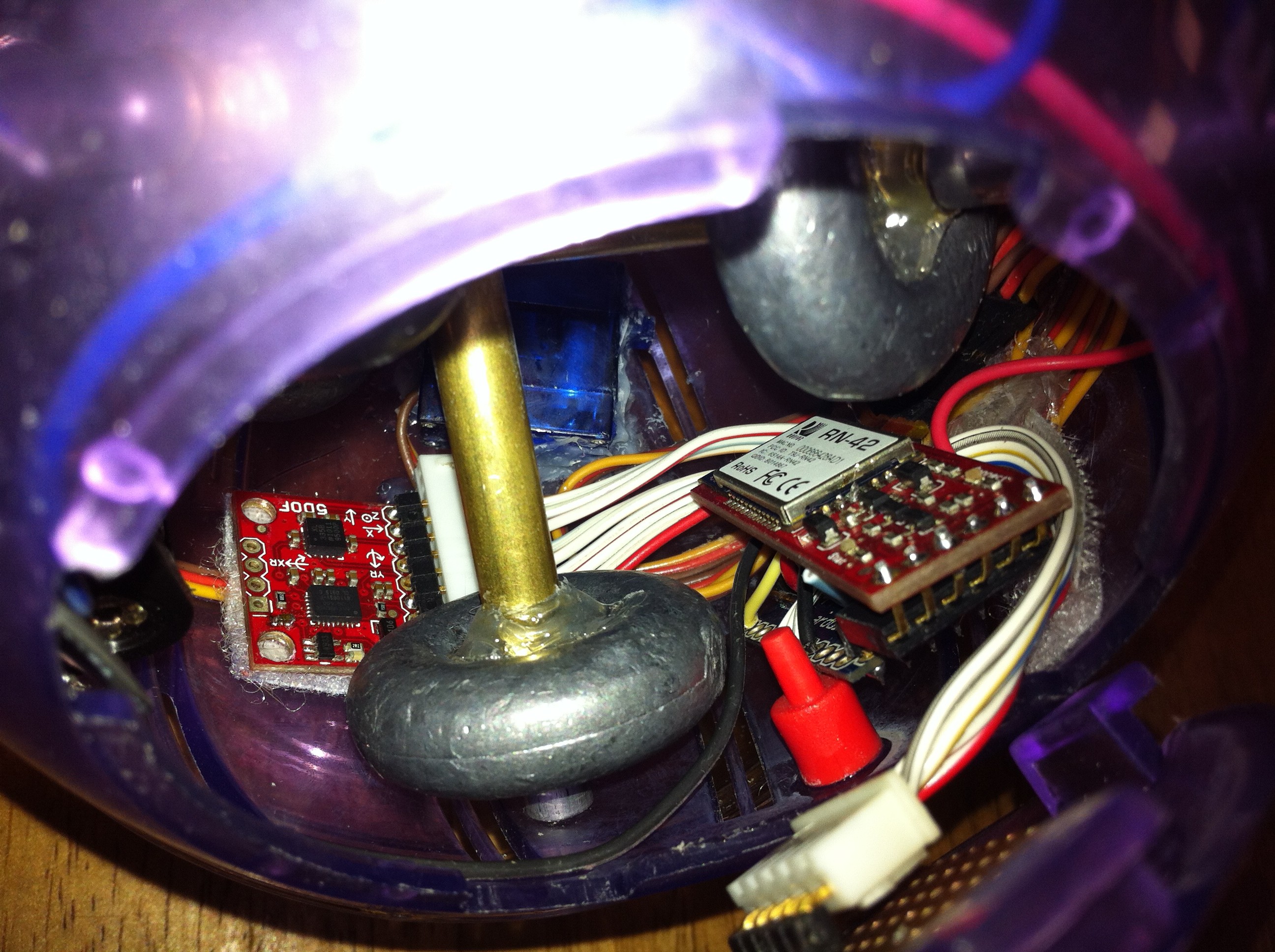
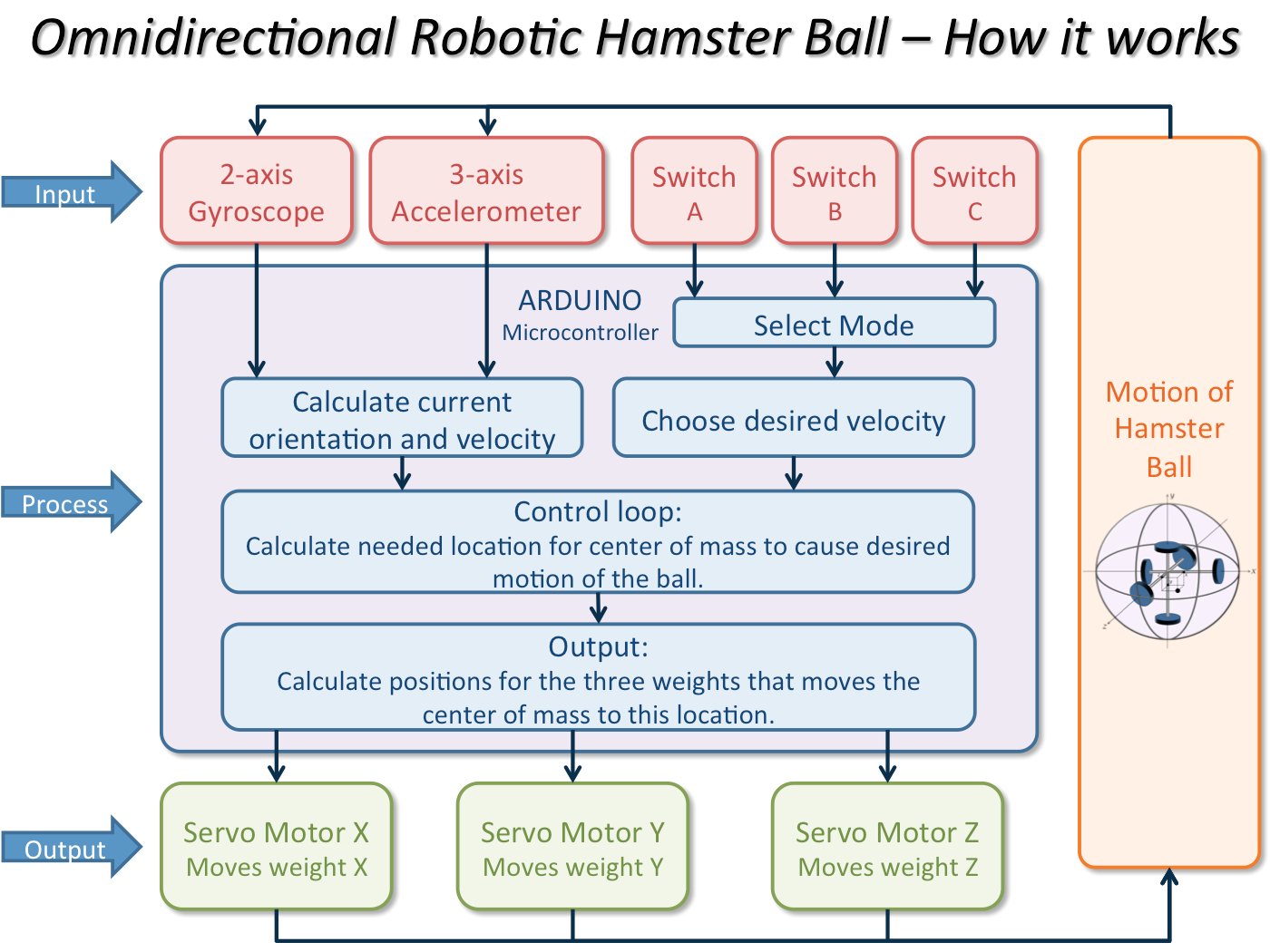
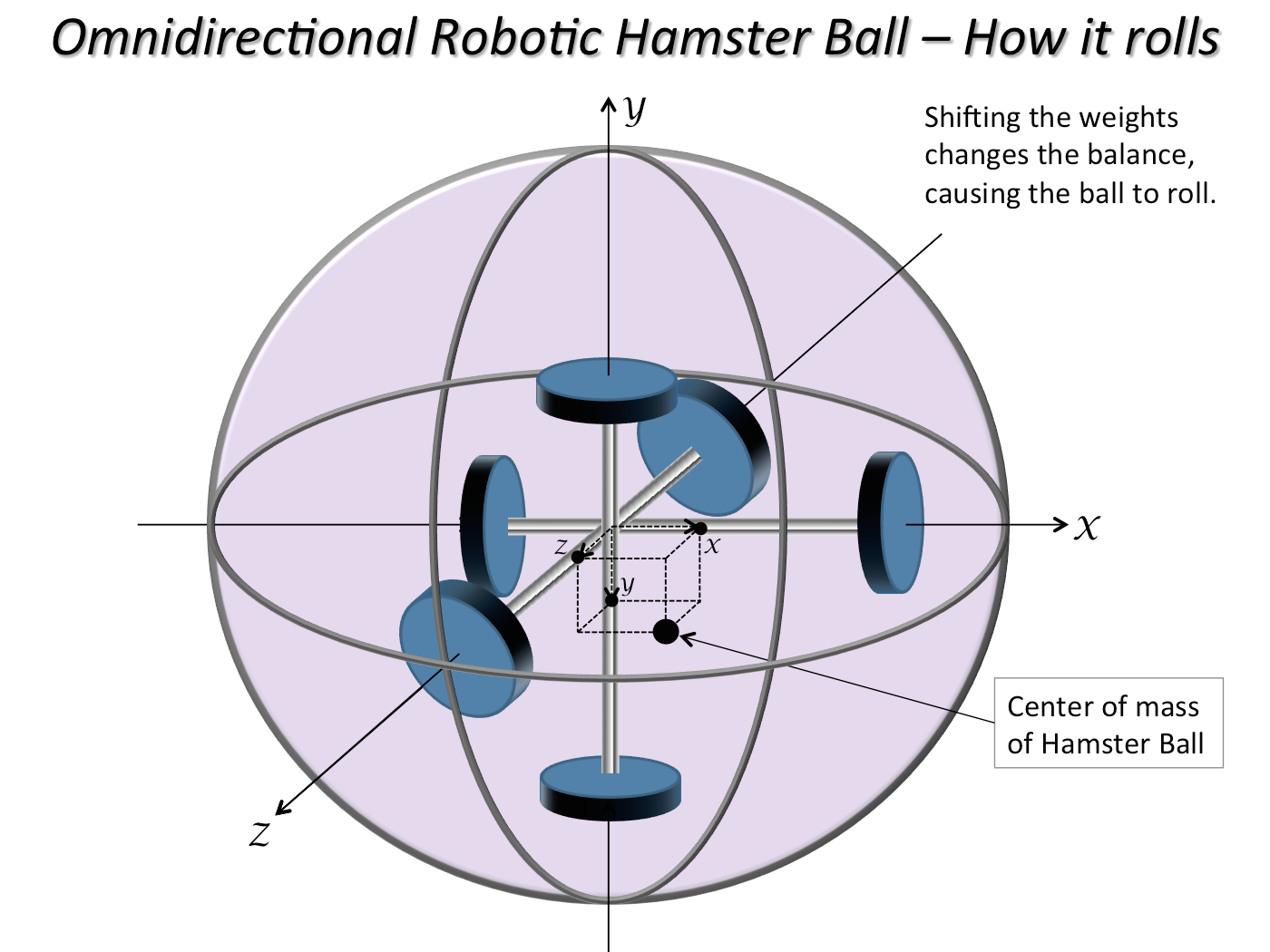
A dwarf-hamster ball using sliding weights, servos, gyros, accelerometers, a compass, and an Arduino microcontroller to roll the ball around. It uses a unique propulsion mechanism such that there is no rotational axis, it can go in any direction at any time.
Won Blue Ribbon at Maker Faire Bay Area 2012 (Maker Faire Editor’s Choice Ribbons)
Video interview at Maker Camp: video (8:44)