 Sticky post
Sticky post
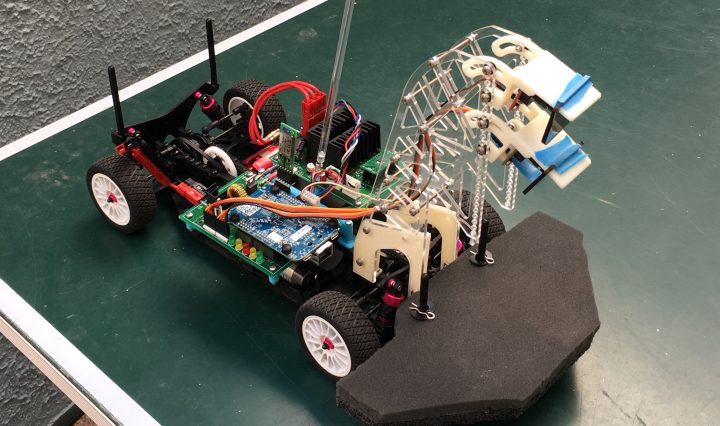
Autonomous Race Car
A 1/10 scale, line following race car built to compete in the 2016 UC Davis NATCAR Race. It placed 2nd out of 43 teams.…
Sticky post
A 1/10 scale, line following race car built to compete in the 2016 UC Davis NATCAR Race. It placed 2nd out of 43 teams.…
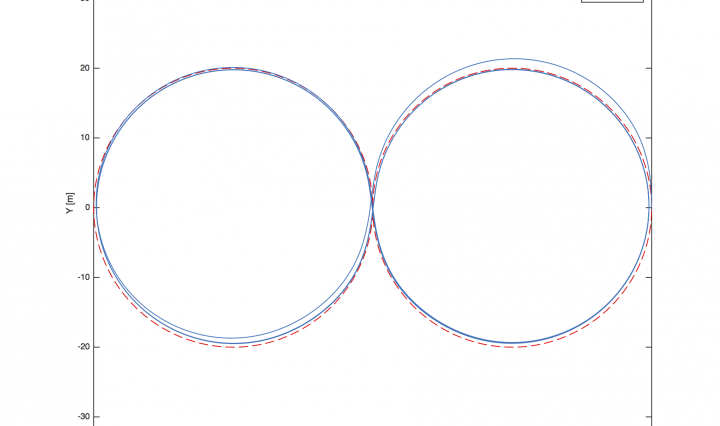
Design and analysis of a novel control system for driving a vehicle with no human input along a predefined or generated on-the-fly path.…

A dwarf-hamster ball using sliding weights, servos, gyros, accelerometers, a compass, and an Arduino microcontroller to roll the ball around. It uses a unique propulsion mechanism such that there is no rotational axis, it can go in any direction at any time.…