
Tellaride
An intelligent bike sensor that has natural English query support for recorded motion data. It consists of a wheel mounted, embedded sensor, iPhone app, and cloud server.…
An intelligent bike sensor that has natural English query support for recorded motion data. It consists of a wheel mounted, embedded sensor, iPhone app, and cloud server.…
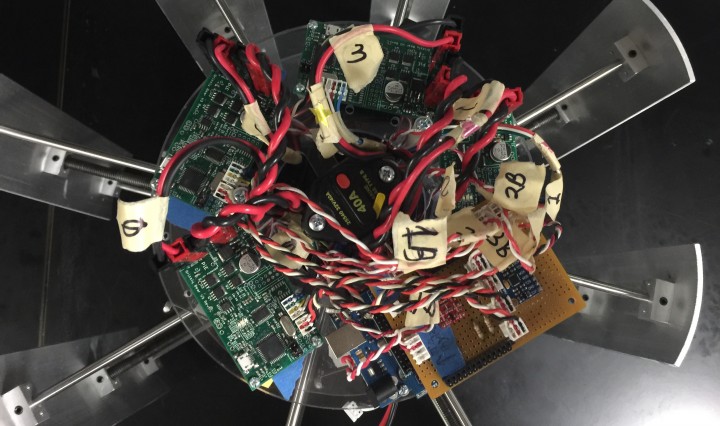
A shapeshifting robot that rolls by changing its shape thanks to cylindrical, motor-controlled, external plate pairs surrounding an inner core. The plates both push off the ground and change the location of the center of gravity, resulting in movement!…
 Sticky post
Sticky post
A Foosball table that plays against you. It sees the ball with an overhead camera and moves the opposing men with actuators mounted to the side.…
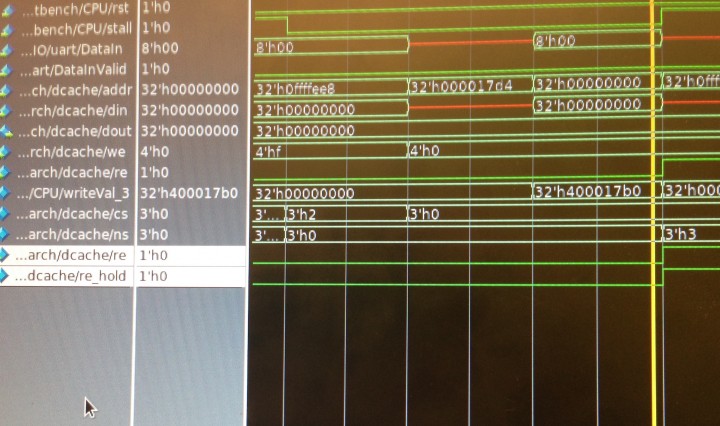
A 100 MHz CPU implemented on the Virtex-5 FPGA with hardware graphics acceleration. Includes a three-stage pipeline, caching, UART, and a display monitor with fast drawing of lines and circles.…
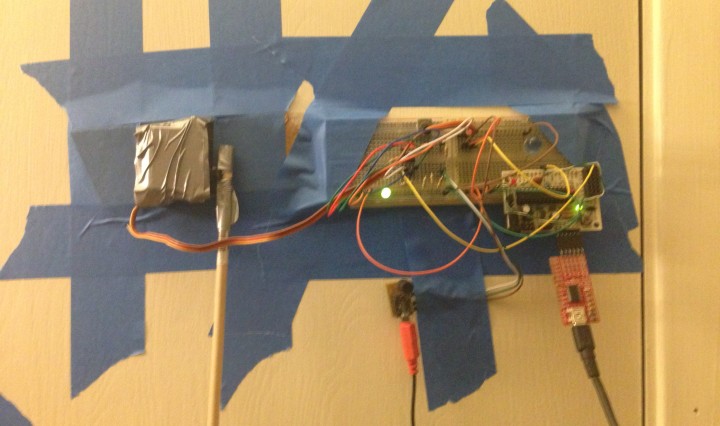
A device that waits for someone to knock on the door and then knocks back with the same sequence of knocks.…
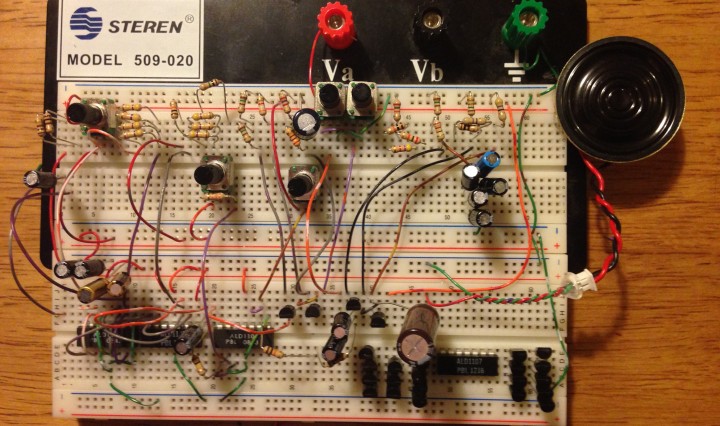
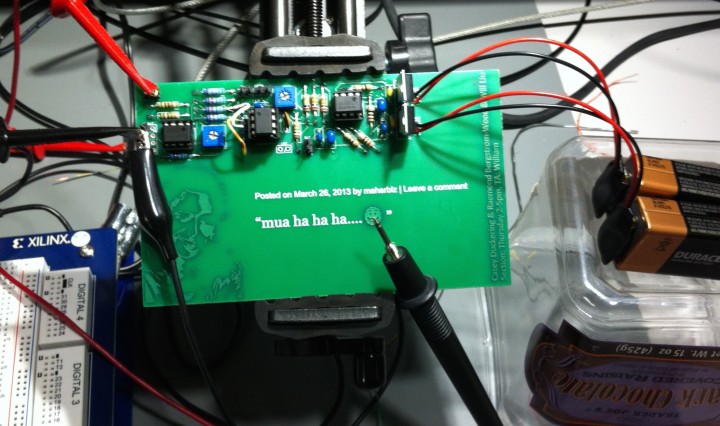
A multistage audio amplifier build out of discrete transistors (BJT and MOSFET). The amplifier had a gain of about , a very high input impedance, and an output impedance to match the speaker. The AM radio antenna and demodulator circuit were provided for the class.…
Under construction.
EE40—Introduction to Microelectronic Circuits Final Project.…

An RC helicopter flown by hand gestures. Tilt, raise and lower your hand above the Leap Motion Controller to steer and control throttle. Built from scratch for a 24-hour hackathon at UC Berkeley.…

A digital alarm clock re-purposed to display the time as a binary number. All the original electronics were removed and replaced with custom circuitry including an AVR microcontroller, display driver circuit, power supply, and a two-tone audio amplifier with speaker.…

A dwarf-hamster ball using sliding weights, servos, gyros, accelerometers, a compass, and an Arduino microcontroller to roll the ball around. It uses a unique propulsion mechanism such that there is no rotational axis, it can go in any direction at any time.…

Under construction.…