 Sticky post
Sticky post
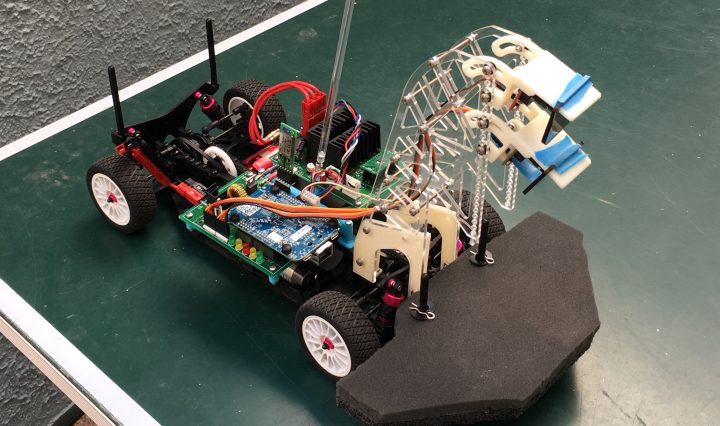
Autonomous Race Car
A 1/10 scale, line following race car built to compete in the 2016 UC Davis NATCAR Race. It placed 2nd out of 43 teams.…
Sticky post
A 1/10 scale, line following race car built to compete in the 2016 UC Davis NATCAR Race. It placed 2nd out of 43 teams.…
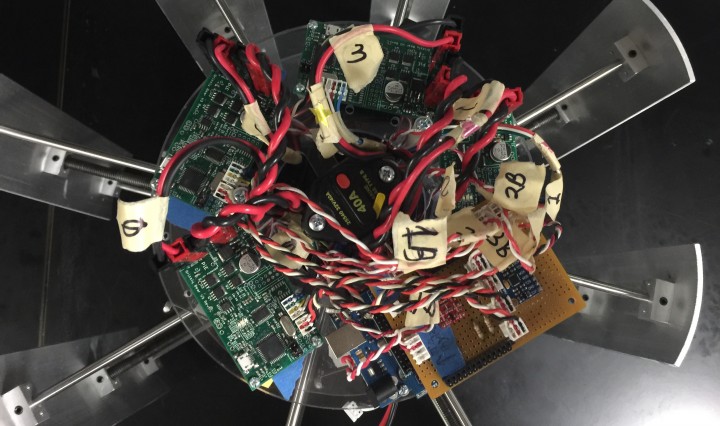
A shapeshifting robot that rolls by changing its shape thanks to cylindrical, motor-controlled, external plate pairs surrounding an inner core. The plates both push off the ground and change the location of the center of gravity, resulting in movement!…
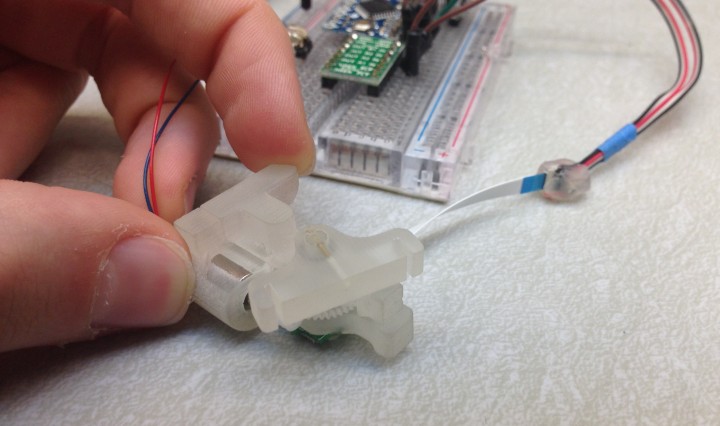
The goal of this project is to create micro-robots that can simulate standard insect/animal motions such as walking and running while being able to jump over encountered obstacles. The simulation of jumping mechanisms found in nature on fully mechanical robots can be used to better understand how and why they are used.…
 Sticky post
Sticky post
A Foosball table that plays against you. It sees the ball with an overhead camera and moves the opposing men with actuators mounted to the side.…

This robot reads math problems written on a whiteboard and will carefully draw the solution after the equals sign. …
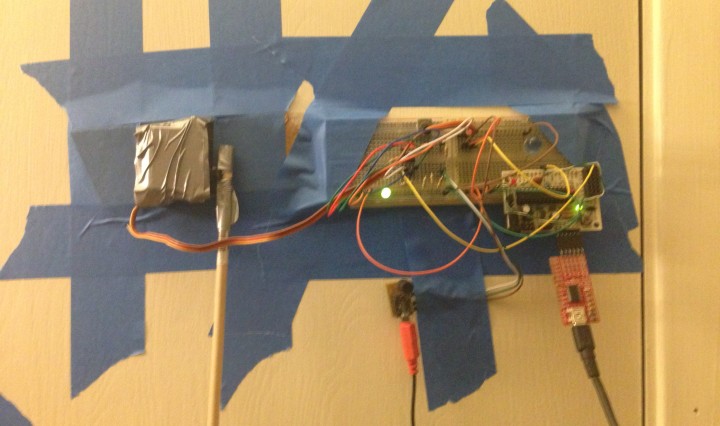
A device that waits for someone to knock on the door and then knocks back with the same sequence of knocks.…

An RC helicopter flown by hand gestures. Tilt, raise and lower your hand above the Leap Motion Controller to steer and control throttle. Built from scratch for a 24-hour hackathon at UC Berkeley.…

A dwarf-hamster ball using sliding weights, servos, gyros, accelerometers, a compass, and an Arduino microcontroller to roll the ball around. It uses a unique propulsion mechanism such that there is no rotational axis, it can go in any direction at any time.…

Under construction.…